

(1)ツールパス生成に必要な情報の取得
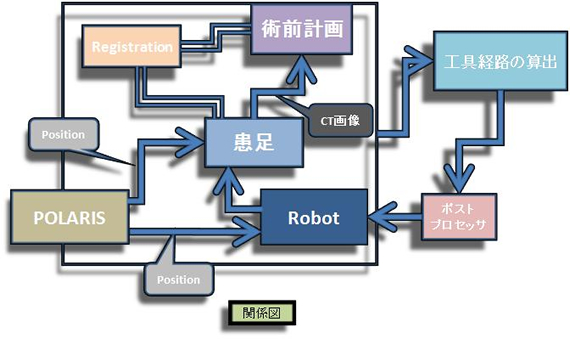
(A)術前計画
予め撮られたCT画像をもとに、インプラント設置面の情報を含む骨のデータ。
(B)患足情報
実際に手術を行う患者の足の骨の情報。
大腿骨、脛骨にマーカを付け、実空間上での骨の座標と姿勢を認識できる様にしている。
(C)骨の3次元モデル
CTデータから骨形状を抽出し、構築した3次元モデル
(D)開創領域の計測
工具が進入する為に皮膚を切除して創った穴(開創領域)を計測プローブを用いて計測する。
また、上記(A)(B)(C)のデータの座標上の合わせこみを行う(Registration)
Registrationの結果を多軸加工機の機械座標系に取り込むことで、ツールパスの生成が可能となる。
(2)ツールパス生成方法
(a)有効開創領域を決定する
上記(D)にて計測した開創領域を有効な開創部として決定する。
(b)工具の基本進入姿勢の決定
開創部と人工関節設置面の重心を求め、これらを結ぶ方向を工具の基本侵入姿勢とする。
(c)切除面の決定
切除領域から、既に切除済みの部分と侵入不可領域を除外し、切除すべき領域を決定する。
(d)ワーク座標系の決定
有効開創領域で対象領域の切除が可能であるかどうかをワーク座標系を回転させながらチェックする。
全領域を切除できない場合は、最大限の領域を切除できる工具姿勢を選択し、ワーク座標系を決定する。
(e)CutterLocationを計算
(a)(b)(c)(d)で計算した工具姿勢とワーク座標系を用いて、CutterLocation(CL)を計算する。
(f)計算された各CL点に対して最終的な工具姿勢を計算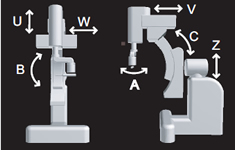
工具初期姿勢は今回使用する実験装置(右図)中の回転軸Bと
C軸を用いて生成し、 切除中の最終的な工具姿勢は冗長軸である
残りの回転1軸を用いて決定する。
(g)NCデータを出力
ポストプロセッサを通し、実験装置の軸構成に適合したNCデータを出力する 。
(3)本研究の有用性
本研究の有用性を実証する為に、医用ロボットを用いて加工実験を行っている。