

(1)加工実験に使用する装置の説明
◆光学式3次元位置計測器(Northern Digital Inc., Polaris)
トラッカーと呼ばれるマーカーを使用し、実空間上での物体の位置と姿勢を認識できる装置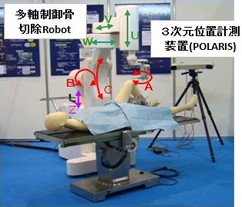 。
。
トラッカーの取り付け場所は、以下の3箇所。
・大腿骨、脛骨に各1つずつ
・ロボット
・プローブ
(開創領域の検出等に使用するモバイル用マーカー)
◆多軸制御骨切除ロボット
現在、開発中の多軸制御骨切除ロボット。
Z⇒B⇒C⇒W⇒V⇒U⇒A軸の順に可動部と軸を設置。
機構的特徴としては以下2点が挙げられる。
・直線案内要素と円弧案内要素による合成の向上
・回転自由度の回転中心の一致
患足に対して片側からアプローチし、反対側のスペースを術者作業領域としている。
(2)実際の手術の流れ
①装置準備
POLARIS用トラッカーを各部位に取り付け、患足を固定する。
②Registration(術前計画と実データの合わせこみ)
以下の計測により、術前計画と現在の骨(患足)の実データの座標上の合わせこみを行う。
・骨の特徴点を計測(プローブを使用)
予め計測した骨のCT画像上の点(特徴点)と実データ(患足)から計測した点とを合わせ、術前計画(インプラント設置面)の位置を適合させる。
・切除する骨の表面をプローブで計測(SurfaceRegistration)
特徴点と同様に、CT画像上の骨面と患足の骨面を合わせこむ。
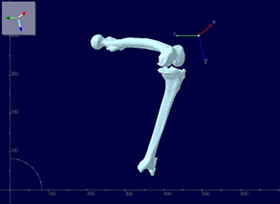
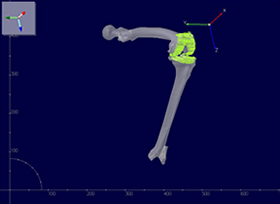
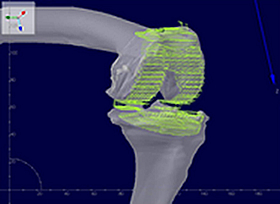
③ツールパスの算出
術前計画の座標と実データの座標(骨座標系、機械座標系)が認識できた為、それらを用いてツールパスの生成を行う。
ツールパスの算出の際、以下の点に考慮する。
・患者の安全面(切除部以外の体組織への危険の回避)
・ロボット姿勢の急激な変化
現在の開創領域で切除できる最大領域のパスを算出。
切除予定の領域を網羅できない場合は、現在の開創領域で最大限の領域を切除できる工具姿勢を選択し、
残り領域に対して、再度開創領域の決定を行わなければならない。
| 骨全体 | 膝関節 |
 |
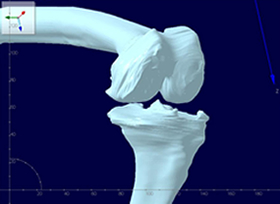 |
| ↓ ツールパス算出 ↓ | |
 |
 |
④骨切除開始
算出したパスに沿って、ロボットによる切削。
⑤インプラント設置
術前計画により、予め用意されたインプラントを患足に設置。
⑥開創領域の縫合
最後に開創領域を縫合し、手術終了。